 • FRI FRAGT VED KØB OVER 700 KR.
• Skriv til os
• 30 dages returret
• FRI FRAGT VED KØB OVER 700 KR.
• Skriv til os
• 30 dages returret 2,390 kr. inkl. moms


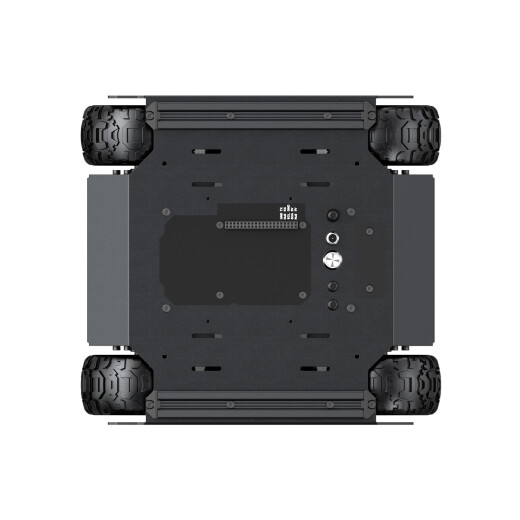




WaveShare 6×4 Off-Road UGV 6 hjul 4WD mobilt robotchassis med ESP32 slavecomputerforlængerskinner
2,390 kr. inkl. moms
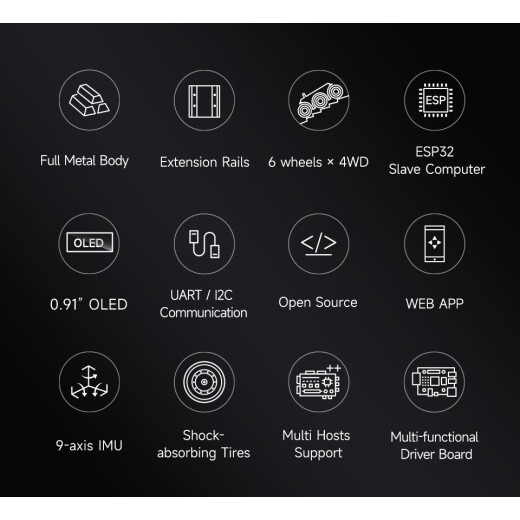
Den UGV02-serie er et mobilt robotkøretøj med 6 hjul og firehjulstræk, der skiller sig ud med fremragende terrængående evner og støddæmpningspræstationer. Det har fleksible gummihjul og 2 x 1020 spor i europæisk standard, hvilket giver flere muligheder for sekundær udvikling. Mål: 252x230x94 mm. Reifenmaterial: Nylonnav, gummihjul. Gehäusehöhe: 25 mm.
Ikke på lager
UGV02 -serien er et 6-hjuls, firehjulstrukket mobilt robotchassis, som har fremragende terrængående mobilitet og stødabsorberende ydeevne. Alle open source-koder til sekundær udvikling er tilgængelige. Den understøtter flere værtscomputere (Raspberry Pi, Jetson Nano, Jetson Orin Nano osv.), værtscomputeren kan kommunikere med ESP32-slavecomputeren via seriel port. Designet med 6 hjul x 4 hjulstræk øger kontaktarealet med jorden og belastningskapaciteten, hvilket sikrer stærk ydeevne. Indbygget 3S UPS strømforsyningsmodul, understøtter 3 x 18650 Li batterier (serieforbundet, IKKE inkluderet i indholdet), som giver uafbrudt strøm til robotten, samtidig med at den understøtter opladning og strømudgang. Indbygget multifunktionelt robotdriverkort, baseret på ESP32, med indbygget WiFi og Bluetooth, til kørsel af serielle busservoer, udsendelse af PWM-signaler, udvidelse af TF-kortslot osv.
UGV02 har fleksible gummidæk, der markant reducerer påvirkningen af vanskeligt terræn og nemt opfylder kravene til tung belastning, stødabsorbering og offroad-evne. Den er desuden udstyret med 2 x 1020 europæisk standard profilskinner, hvilket giver flere muligheder for sekundær udvikling.
Angiv
- Udvendige mål: 252x230x94mm
- Dækmateriale: nylon hjulnav, gummidæk
- Kassehøjde: 25 mm
- Skinnemidtafstand: 203 mm
- Dækbredde: 42 mm
- Løbehastighed: 0,05-0,41m/s
- Dækdiameter: 80 mm
- Antal drivhjul: 4
- Antal hjul: 6
- Urkassemateriale: 2 mm (tykkelse) 5052 aluminiumslegering
- Vægt: 2 kg
- Lodret forhindringsevne: 40 mm
- Kørebelastning: 4 kg
- Klatreevne: 22°
- Batteristøtte: 18650 lithium batteri x 3 (IKKE inkluderet i indholdet)
- Minimum rotationsradius: 0 m (in-situ rotation)
- Opladningstid: 1,5 time
- Batterilevetid: 45 minutter (kontinuerlig ydeevne ved fuld effekt)
- Motoreffekt: 5W x 4
- Fjernbetjeningsfunktion: WIFI AP/STA
- Overflade: 37864 mm2
- Kommunikationsgrænseflade: UART / seriel bus servogrænseflade / I2C
WIKI: www.waveshare.com/wiki/UGV02
Indhold
- 1x UGV02 (EU)

-
Ikke på lager

Byggeprojekter
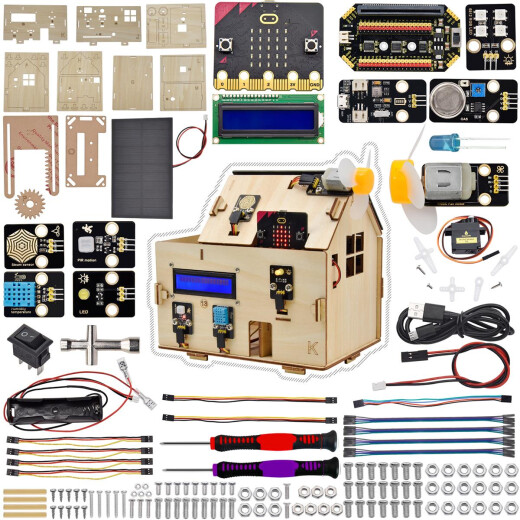
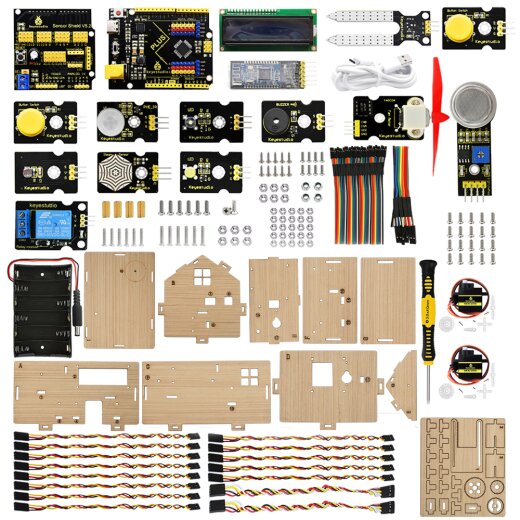
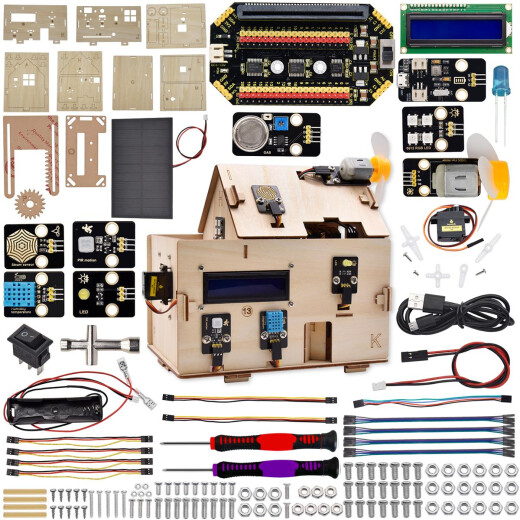
Keyestudio Smart Home Kit med PLUS Board til Arduino DIY STEM
880 kr. inkl. moms

-
Ikke på lager


Byggeprojekter
Waveshare JetBot AI Kit Tilbehør Add-ons til Jetson Nano B01 til at bygge JetBot
1,291 kr. inkl. moms



-
Ikke på lager


Byggeprojekter
WaveShare JetRacer Pro AI Kit, High Speed AI Racing Robot drevet af Jetson Nano
5,378 kr. inkl. moms





Produkter
-
 Pololu Plastic Hjul 60x8mm Par Hvid til Micro Metal Gearmotorer
113 kr. inkl. moms
Pololu Plastic Hjul 60x8mm Par Hvid til Micro Metal Gearmotorer
113 kr. inkl. moms
-
 Pololu Universal aluminiums monteringsnav til 6 mm skaft #4-40 huller (2-pak)
174 kr. inkl. moms
Pololu Universal aluminiums monteringsnav til 6 mm skaft #4-40 huller (2-pak)
174 kr. inkl. moms
-
 Pololu Universal aluminiums monteringsnav til 4 mm skaft M3 huller (2-pak)
146 kr. inkl. moms
Pololu Universal aluminiums monteringsnav til 4 mm skaft M3 huller (2-pak)
146 kr. inkl. moms
-
 Pololu Micro Metal Gearmotor Bracket Par Sort til Montering
50 kr. inkl. moms
Pololu Micro Metal Gearmotor Bracket Par Sort til Montering
50 kr. inkl. moms
-
 Højttaler 8 Ohm 0,5W 50 mm højttaler til ethvert lydprojekt
25 kr. inkl. moms
Højttaler 8 Ohm 0,5W 50 mm højttaler til ethvert lydprojekt
25 kr. inkl. moms
-
 40 mm 1,5" intern magnetisk 4Ohm 5W bas multimediehøjttaler
55 kr. inkl. moms
40 mm 1,5" intern magnetisk 4Ohm 5W bas multimediehøjttaler
55 kr. inkl. moms
-
 77,9 mm diameter basmembran passiv pladeforstærket lavfrekvent radiatorgummimembran
39 kr. inkl. moms
77,9 mm diameter basmembran passiv pladeforstærket lavfrekvent radiatorgummimembran
39 kr. inkl. moms
-
 Adafruit-højttaler 3" Diameter 4Ohm 3Watt til lydprojekt
69 kr. inkl. moms
Adafruit-højttaler 3" Diameter 4Ohm 3Watt til lydprojekt
69 kr. inkl. moms
-
 Højttaler 8 Ohm 0,5W 36mm højttaler til lydprojekter
28 kr. inkl. moms
Højttaler 8 Ohm 0,5W 36mm højttaler til lydprojekter
28 kr. inkl. moms
Seneste viste produkter
-
 WaveShare AC8265 Wireless NIC til Jetson Nano WiFi / Bluetooth
206 kr. inkl. moms
WaveShare AC8265 Wireless NIC til Jetson Nano WiFi / Bluetooth
206 kr. inkl. moms
-
 SparkFun LED - RGB adresserbar, PTH, 5 mm klar (5 Pack)
98 kr. inkl. moms
SparkFun LED - RGB adresserbar, PTH, 5 mm klar (5 Pack)
98 kr. inkl. moms