 • FRI FRAGT VED KØB OVER 700 KR.
• Skriv til os
• 30 dages returret
• FRI FRAGT VED KØB OVER 700 KR.
• Skriv til os
• 30 dages returret 606 DKK inkl. moms


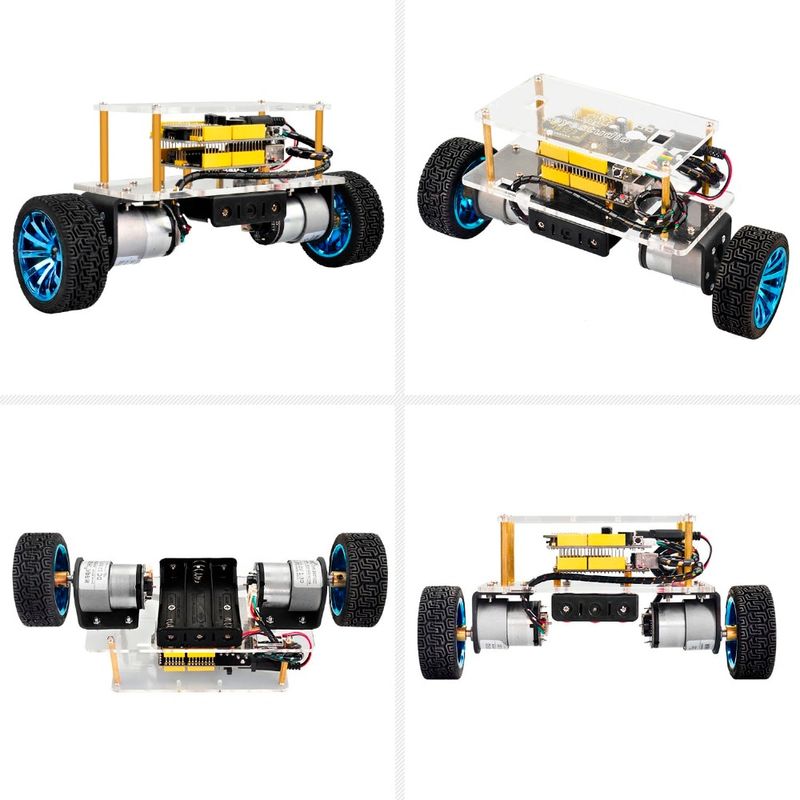





Keyestudio Self-balancing Car Kit For Arduino Robot
606 DKK inkl. moms
Oversighted
Hvordan kan du selv bygge en mini-balancebil? Dette balancebilkit er baseret på Arduino-udviklingsplatformen. Vi bruger hovedsageligt REV4 som kerne- og skaleplade med indbygget MPU-6050 som drivkort for at teste karrosseristillingen.
Balance Shield er udstyret med en Bluetooth-interface, der er fuldt kompatibel med Bluetooth XBee-modulet (kun med Android-system).
Hvis du opretter forbindelse til Bluetooth, kan du nemt kontrollere køretøjets bevægelsesretning med Bluetooth APP og vedtage en række unikke positioner. For at gøre operationel kontrol lettere har Bluetooth APP både knap- og tyngdekraftkontroltilstande.
Endnu mere tilføjer det funktionen af at justere balancevinklen og PID-parametrene, så du perfekt kan justere og kontrollere balancevognen. Du behøver ikke at bekymre dig om, hvordan du spiller det. Vi kan give dig alle komponenter i samlingen såvel som den tilsvarende installation, fejlfindingsmetoden og programmet.
Driftsprincip
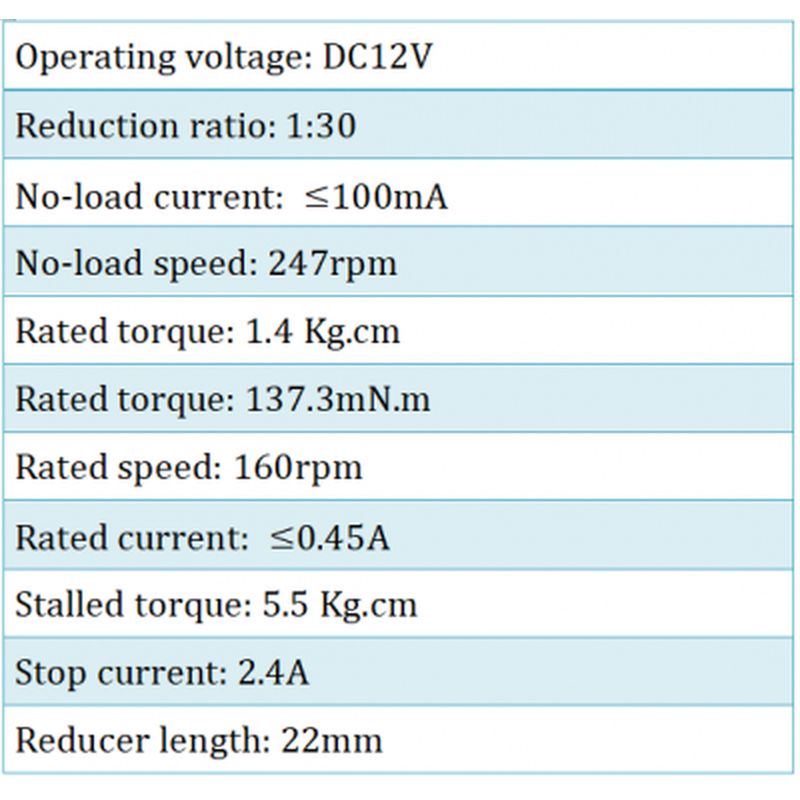
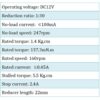
Den selvbalancerende bil bruger kroppens kraft til at opretholde relativ balance, som er en proces med dynamisk balance. Kraften til at opretholde bilens balance kommer fra bevægelsen af hjulene, der drives af to jævnstrømsmotorer.
Styringen af kroppen kan opdeles i tre kontrolopgaver:
- 1. Balance Control: hold bilen lodret og i balance ved at kontrollere den fremadgående og bagudgående rotation af bilens hjul.
- 2. Hastighedskontrol: Realisering af for- og bagbevægelse og hastighedskontrol ved at kontrollere køretøjets hældning. Faktisk opnås det i sidste ende ved at kontrollere motorens hastighed.
- 3. Retningskontrol: Realisering af styrekontrollen ved at kontrollere hastighedsforskellene mellem køretøjets to motorer.
Dette gør det relativt let at forstå de tre kontrolopgaver. Men i den endelige kontrolproces er reguleringen af en kontrolleret variabel vigtig. Så der er en kobling mellem de tre opgaver, der forstyrrer hinanden.
Nøglen er at kontrollere bilens balance; hastighed og retning kontrol bør være så blid som muligt.
- 2. Arbejdsspænding: DC 9-12V
- 3.Motordrevet chip: TB6612FNG
- 4. Positionsdetektion: MPU-6050
- 5. Leveres med strømkontrolkontakt
- 6.med Bluetooth-kontrolkontakt til styring af den serielle kommunikation
Særlig opmærksomhed:
Skalaetiketten leveres med en skydekontakt til styring af Bluetooth-kommunikationen. Når du uploader kildekoden, skal skydekontakten være sat til OFF, ellers mislykkes uploaden af koden. Når du opretter forbindelse til Bluetooth-modulet, skal du indstille glidekontakten til ON.
Ikke på lager
Oversighted
Hvordan kan du selv bygge en mini-balancebil? Dette balancebilkit er baseret på Arduino-udviklingsplatformen. Vi bruger hovedsageligt REV4 som kerne- og skaleplade med indbygget MPU-6050 som drivkort for at teste karrosseristillingen.
Balance Shield er udstyret med en Bluetooth-interface, der er fuldt kompatibel med Bluetooth XBee-modulet (kun med Android-system).
Hvis du opretter forbindelse til Bluetooth, kan du nemt kontrollere køretøjets bevægelsesretning med Bluetooth APP og vedtage en række unikke positioner. For at gøre operationel kontrol lettere har Bluetooth APP både knap- og tyngdekraftkontroltilstande.
Endnu mere tilføjer det funktionen af at justere balancevinklen og PID-parametrene, så du perfekt kan justere og kontrollere balancevognen. Du behøver ikke at bekymre dig om, hvordan du spiller det. Vi kan give dig alle komponenter i samlingen såvel som den tilsvarende installation, fejlfindingsmetoden og programmet.
Driftsprincip
Den selvbalancerende bil bruger kroppens kraft til at opretholde relativ balance, som er en proces med dynamisk balance. Kraften til at opretholde bilens balance kommer fra bevægelsen af hjulene, der drives af to jævnstrømsmotorer.
Styringen af kroppen kan opdeles i tre kontrolopgaver:
- 1. Balance Control: hold bilen lodret og i balance ved at kontrollere den fremadgående og bagudgående rotation af bilens hjul.
- 2. Hastighedskontrol: Realisering af for- og bagbevægelse og hastighedskontrol ved at kontrollere køretøjets hældning. Faktisk opnås det i sidste ende ved at kontrollere motorens hastighed.
- 3. Retningskontrol: Realisering af styrekontrollen ved at kontrollere hastighedsforskellene mellem køretøjets to motorer.
Dette gør det relativt let at forstå de tre kontrolopgaver. Men i den endelige kontrolproces er reguleringen af en kontrolleret variabel vigtig. Så der er en kobling mellem de tre opgaver, der forstyrrer hinanden.
Nøglen er at kontrollere bilens balance; hastighed og retning kontrol bør være så blid som muligt.
- 2. Arbejdsspænding: DC 9-12V
- 3.Motordrevet chip: TB6612FNG
- 4. Positionsdetektion: MPU-6050
- 5. Leveres med strømkontrolkontakt
- 6.med Bluetooth-kontrolkontakt til styring af den serielle kommunikation
Særlig opmærksomhed:
Skalaetiketten leveres med en skydekontakt til styring af Bluetooth-kommunikationen. Når du uploader kildekoden, skal skydekontakten være sat til OFF, ellers mislykkes uploaden af koden. Når du opretter forbindelse til Bluetooth-modulet, skal du indstille glidekontakten til ON.

Produkter
-
 Keyestudio KEYBOT Programmable Education Robot Car Kit + User Manual For Arduino Graphical Programming
629 DKK inkl. moms
Keyestudio KEYBOT Programmable Education Robot Car Kit + User Manual For Arduino Graphical Programming
629 DKK inkl. moms
-
 Keyestudio Learning Starter Kit for Arduino Education Box 32 Projects
571 DKK inkl. moms
Keyestudio Learning Starter Kit for Arduino Education Box 32 Projects
571 DKK inkl. moms
-
 Keyestudio New Keyestudio New Sensor Kit with UNO R3 for Arduino Starter
700 DKK inkl. moms
Keyestudio New Keyestudio New Sensor Kit with UNO R3 for Arduino Starter
700 DKK inkl. moms
-
 Keyestudio New Keyestudio New sensor kit with MEGA 2560 R3 for Arduino Starter
924 DKK inkl. moms
Keyestudio New Keyestudio New sensor kit with MEGA 2560 R3 for Arduino Starter
924 DKK inkl. moms
-
 Basic starter kit til Arduino (uden UNO R3)
246 DKK inkl. moms
Basic starter kit til Arduino (uden UNO R3)
246 DKK inkl. moms
-
 Learner’s starter kit til Arduino (inkl. UNO R3)
Learner’s starter kit til Arduino (inkl. UNO R3)
638 DKK594 DKK inkl. moms -
 Uno R3 + I O Expansion Sensor Shield mit Cable
185 DKK inkl. moms
Uno R3 + I O Expansion Sensor Shield mit Cable
185 DKK inkl. moms
-
 USB Host Shield compatible with UNO Arduino Google Android ADK
148 DKK inkl. moms
USB Host Shield compatible with UNO Arduino Google Android ADK
148 DKK inkl. moms
-
 Adafruit "Music Maker" MP3 Shield for Arduino w/3W Stereo Amp - v1.0
448 DKK inkl. moms
Adafruit "Music Maker" MP3 Shield for Arduino w/3W Stereo Amp - v1.0
448 DKK inkl. moms
Bedst bedømte produkter
-
 5V stepper motor med driver (28BYJ og ULN2003)
56 DKK inkl. moms
5V stepper motor med driver (28BYJ og ULN2003)
56 DKK inkl. moms
-
 Det ultimative starter kit til Arduino (inkl. UNO R3)
Det ultimative starter kit til Arduino (inkl. UNO R3)
913 DKK766 DKK inkl. moms -
 Adafruit Motor/Stepper/Servo Shield til Arduino v2 Kit
256 DKK inkl. moms
Adafruit Motor/Stepper/Servo Shield til Arduino v2 Kit
256 DKK inkl. moms
-
 NodeMCU inkl. ESP8266 - Arduino kompatibelt WiFi board
115 DKK inkl. moms
NodeMCU inkl. ESP8266 - Arduino kompatibelt WiFi board
115 DKK inkl. moms
-
 Arduino kompatibel UNO R3
136 DKK inkl. moms
Arduino kompatibel UNO R3
136 DKK inkl. moms
-
 Arduino Kompatibel MEGA 2560 R3
228 DKK inkl. moms
Arduino Kompatibel MEGA 2560 R3
228 DKK inkl. moms
-
Keyestudio KEYBOT Programmable Education Robot Car Kit + User Manual For Arduino Graphical Programming
629 DKK inkl. moms
-
 Arduino Kompatibel Nano V3
136 DKK inkl. moms
Arduino Kompatibel Nano V3
136 DKK inkl. moms
-
 Arduino kompatibel Leonardo
143 DKK inkl. moms
Arduino kompatibel Leonardo
143 DKK inkl. moms
Anmeldelser
Der er endnu ikke nogle anmeldelser.